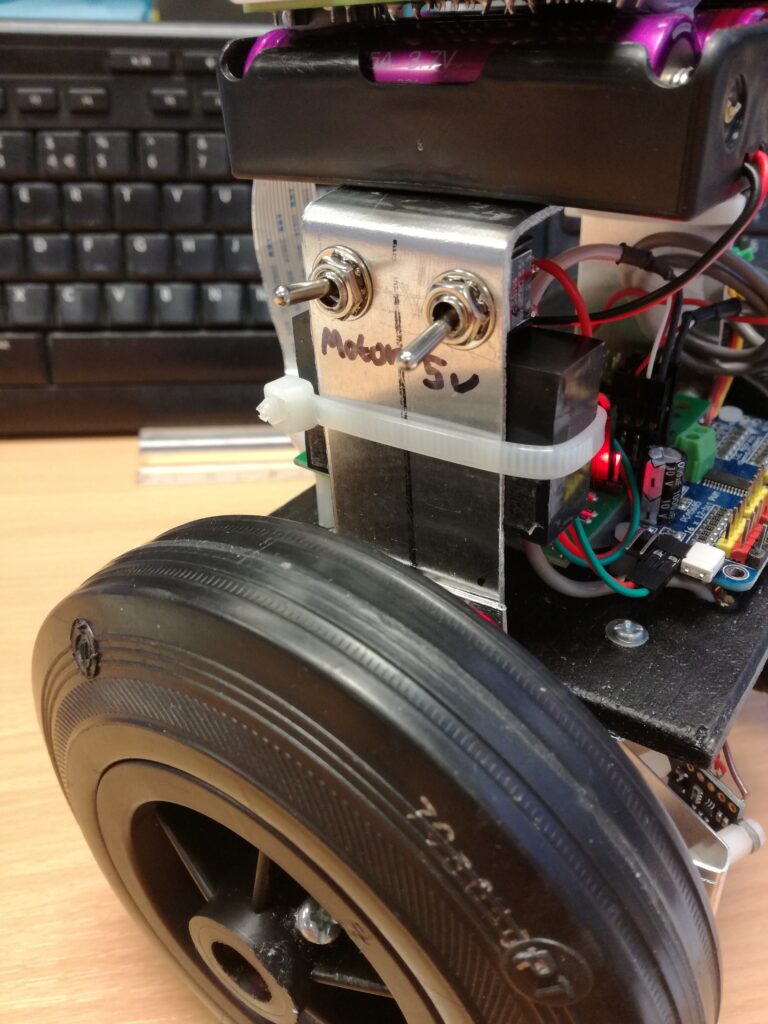
The robot was powered by 4x 18650 Lithium Ion batteries. These were connected in series to give 14.8V, which was connected directly to the motor controller to power the motors, and to a 5V DC-DC converter to power the Pi and other electronics. The DC-DC converter was mounted on one of the uprights, and we also added switches to control the power to the motors and 5V separately:
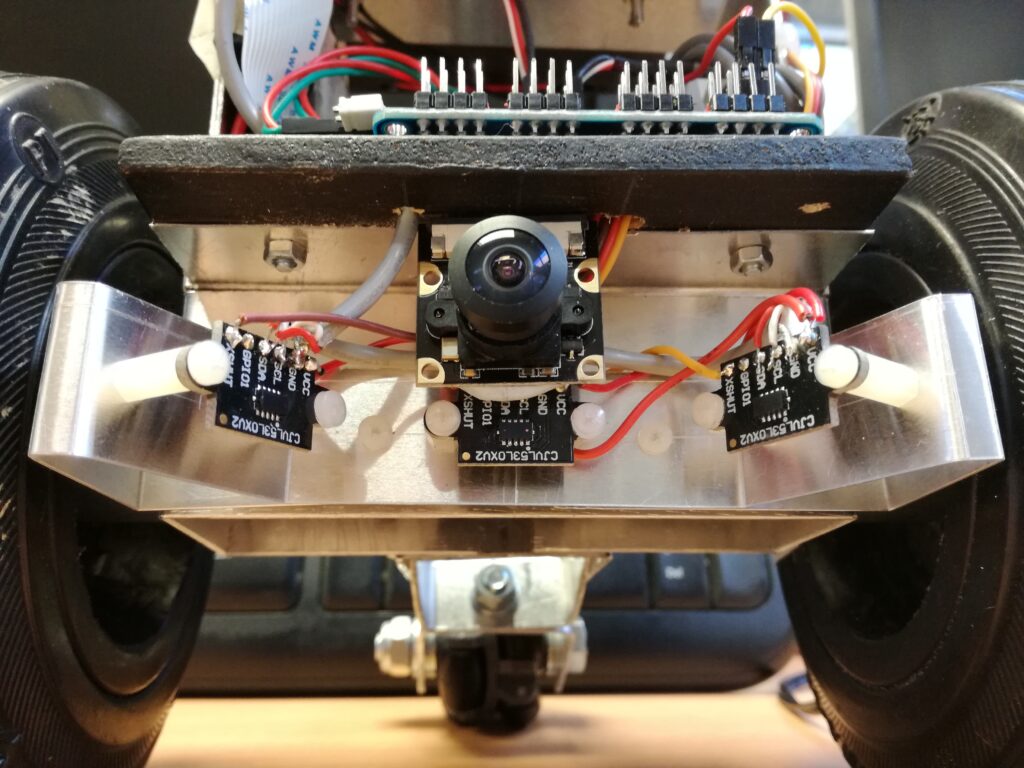
On the front of the robot I mounted a camera and 3x VL53L0X Time-of-flight laser distance sensors:

We also added a servo board to control some servos we needed for some of the events:

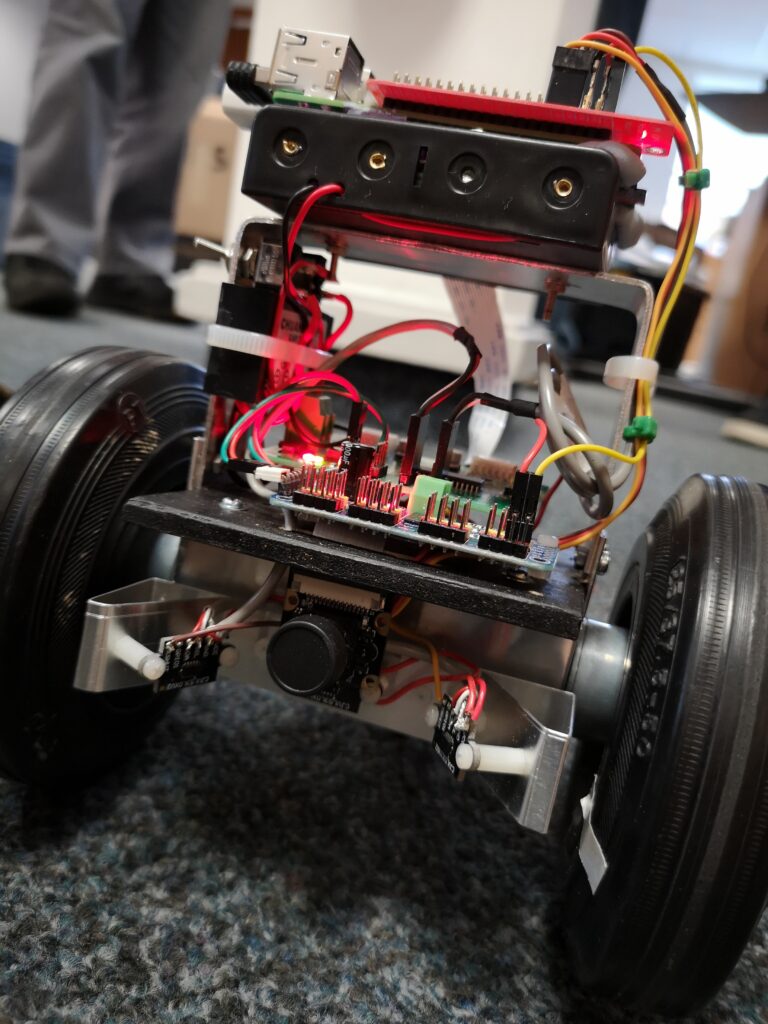
Testing it out: